


JETI Telemetry communication protocol
This document describes a telemetry communication protocol that is used by sensors of JETI model. Telemetry
information is transmitted through a one-wire bus from sensors to receiver. As a following step, the information is
wirelessly sent to another device, such as transmitter, TX module or JETIBOX profi.
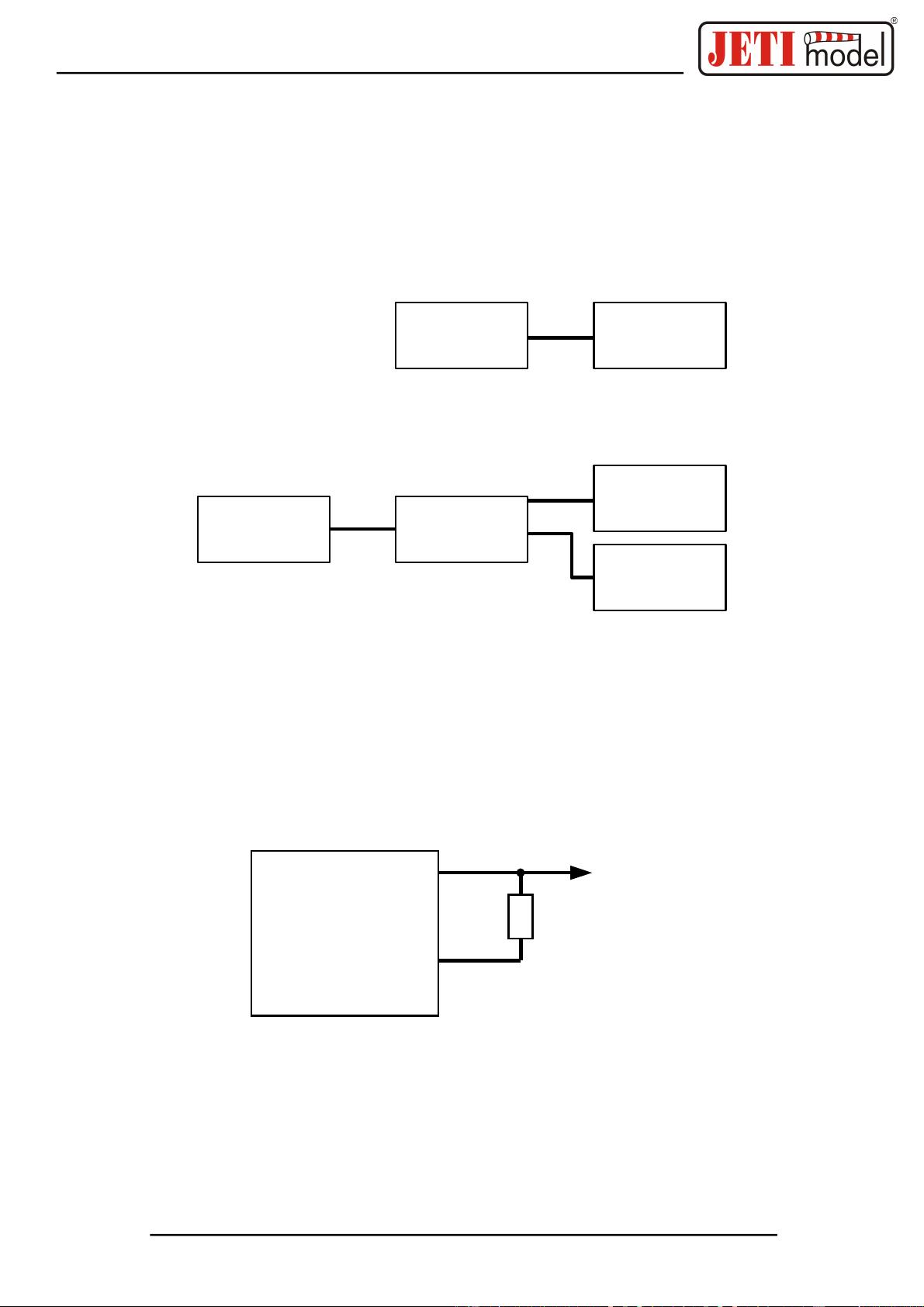
Topology
The bus has a topology called “point to point”. Every sensor is marked as a “master” because it always initiates
communication. A device connected to the sensor is marked as a “slave”. If several sensors are connected, it is
mandatory to use a multiplexer (Expander), that processes all inputs and transforms them into one single output.
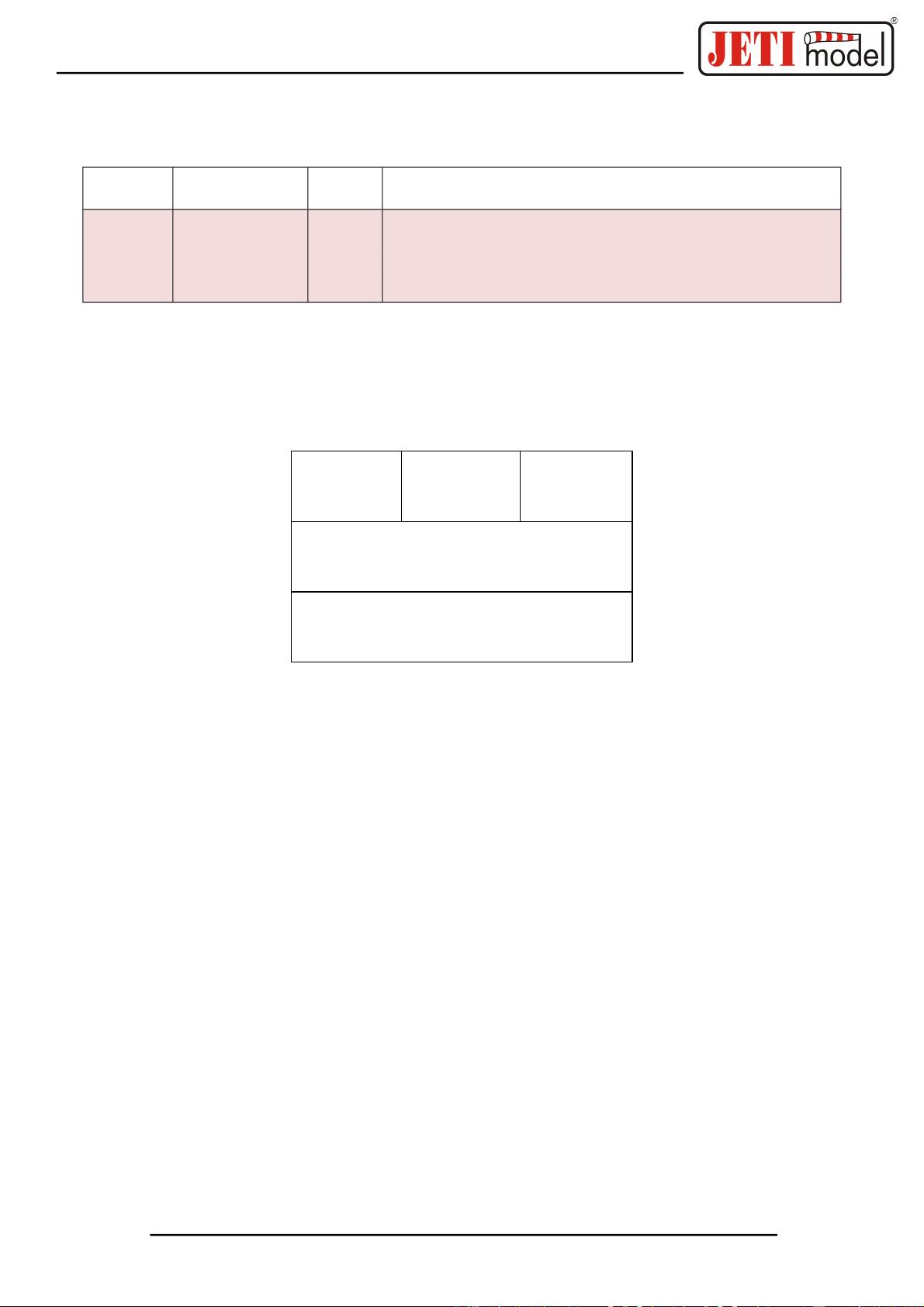
Physical layer
Communication is realized by serial asynchronous interface (UART) in a half-duplex mode.
Communication speed 9600-9800 Baud
Number of data bits 9
Number of stop bits 2
ODD parity
Communication lines RX and TX are physically connected through a resistor with resistance of a few kilo-ohms
(see the following picture).
RX
TX
uP
k
Ω
COM
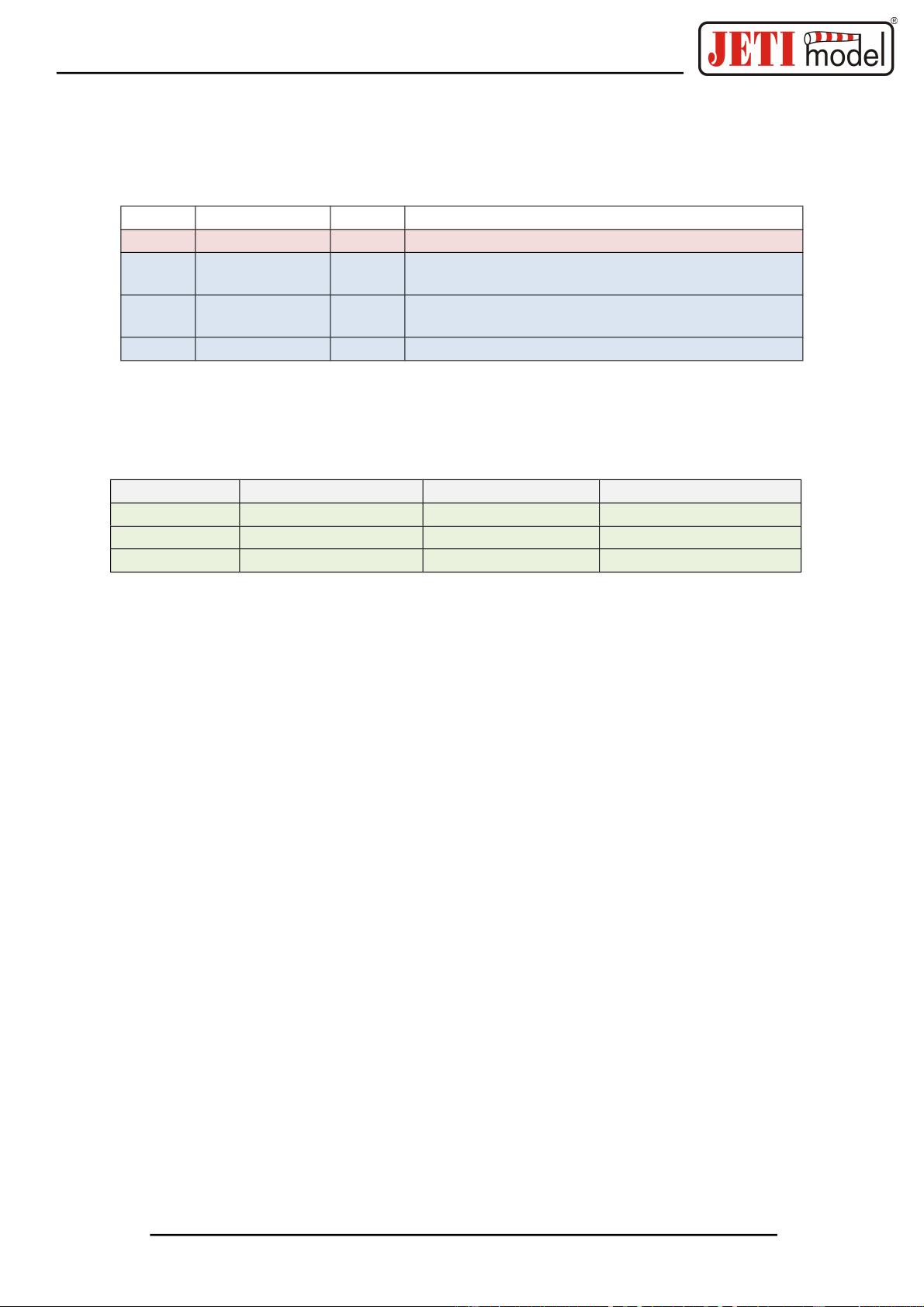
Logic levels:
Maximum level of logical zero “0”: 1,5V
Minimum level of logical one “1”: 3,0V
Accessing shared data bus
The only one active element of a network at a time, and which initiates all communications, is a “master”. It sends
a packet and then releases the bus for at least 20ms. At this time, “slave” is allowed to respond. This situation
repeats periodically. “Slave” doesn't have to respond immediately and it doesn't have to respond at all.
Created on 13
th
August 2012, version: 1.05, manufacturer reserves the right to any change without previous notice.
-1-
Sensor
Receiver or
JETIBOX
Sensor1
Expander
Receiver or
JETIBOX
Master
Slave
Sensor2
Master
Master
Multiplexer
Slave













- 1
- 2
前往页