添加新的mavlink指令到APM中

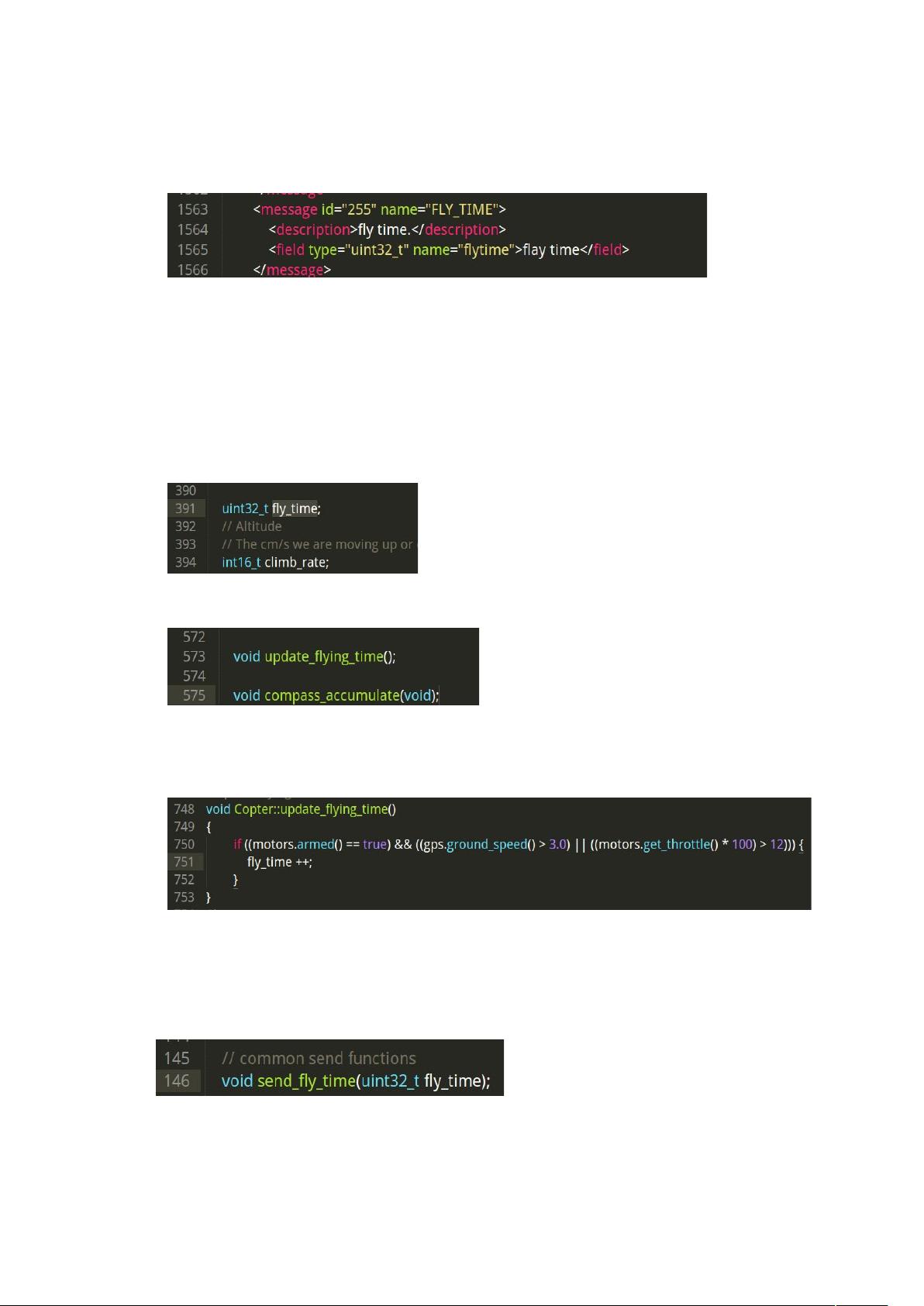
1、 在脚本文件中添加新的 ID
/src/APM/ardupilot/modules/mavlink/message_denions/v1.0/ardupilotmega.xml
添加如下 ID:
2、 编译代码
编译完成后在目录
/src/APM/ardupilot/Build.ArduCopter/libraries/GCS_MAVLink/include/mavlink/v1.0/
ardupilotmega/
生成头文件:mavlink_msg_'y_me.h
3、 添加飞行时间变量和更新变量的函数体
在头文件/src/APM/ardupilot/ArduCopter/Copter.h
中添加 'y_me 变量用来记录飞行时间
在头文件/src/APM/ardupilot/ArduCopter/Copter.h
中添加成员函数
在源文件/src/APM/ardupilot/ArduCopter/ArduCopter.cpp
中添加函数体
飞行时间更新函数放在 void Copter::one_hz_loop()里,1 秒更新一次。
4、 添加发送函数
在头文件/src/APM/ardupilot/libraries/GCS_MAVLink/GCS.h
中添加成员函数
在源文件/src/APM/ardupilot/libraries/GCS_MAVLink/GCS_Common.cpp
中添加函数体
资源评论

 yangdong5002392016-10-25比较详细基本步骤都有,把国外网站上的资料翻译了一下。
yangdong5002392016-10-25比较详细基本步骤都有,把国外网站上的资料翻译了一下。












